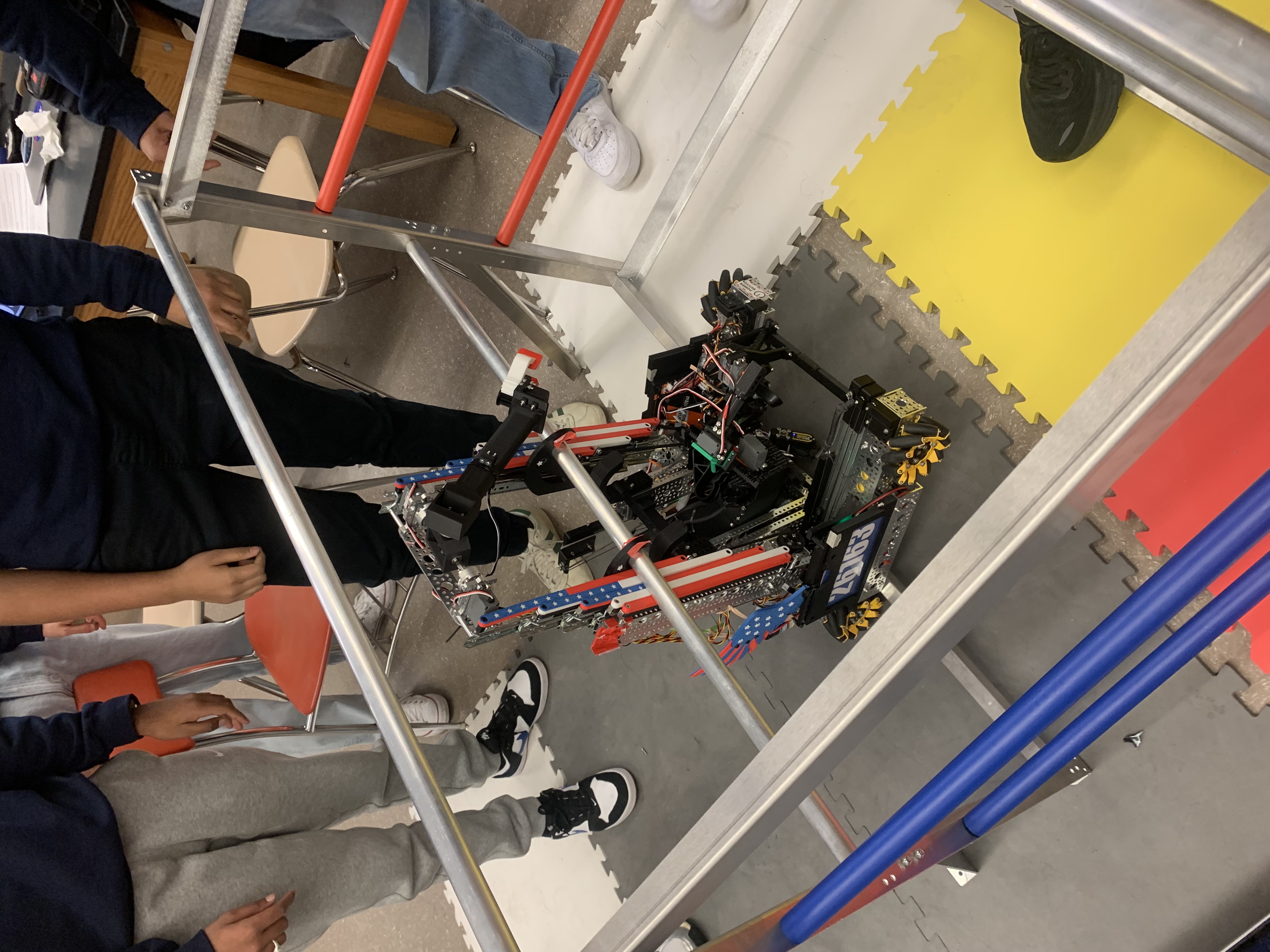
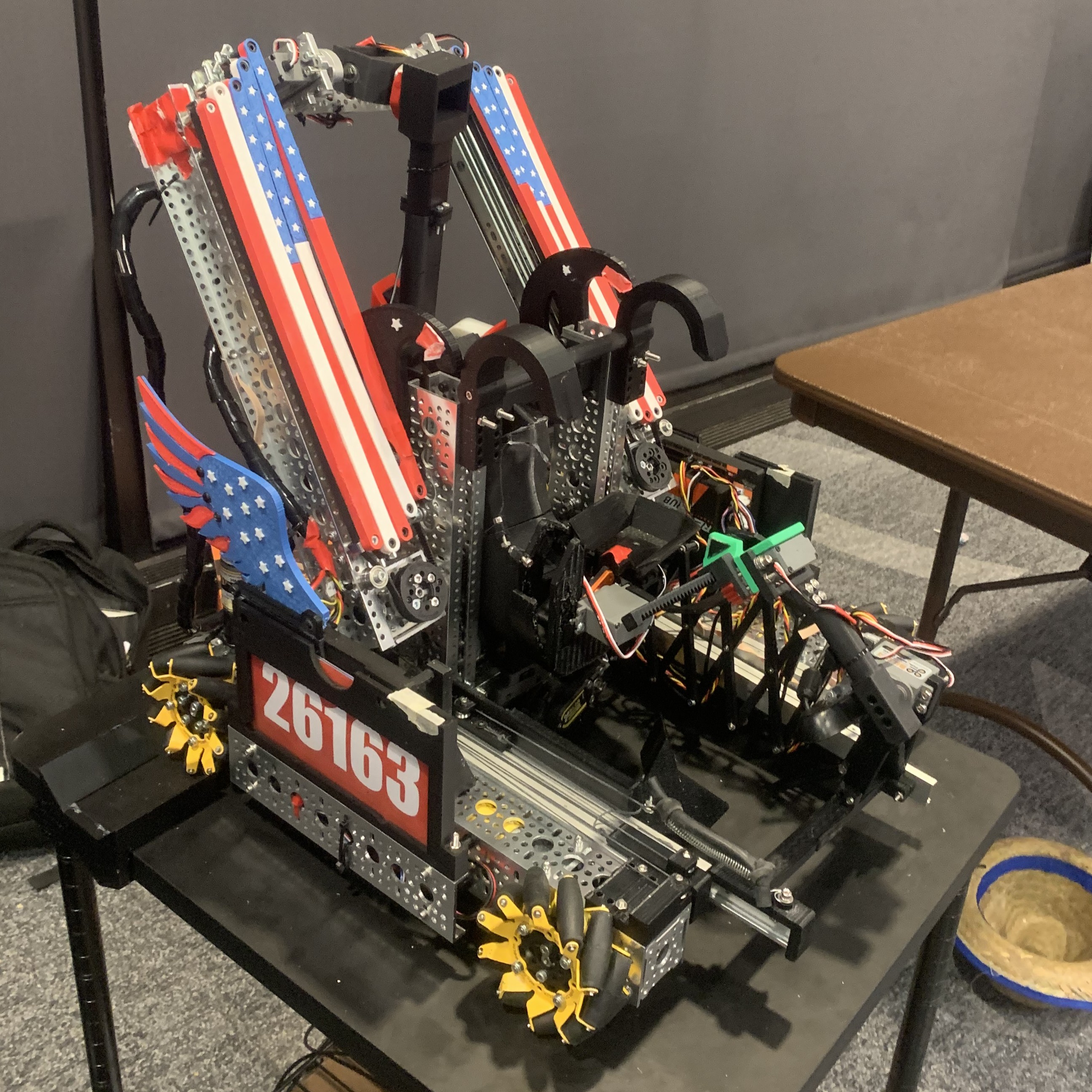
The American is our FTC Into the Deep robot built around a clip-first game strategy: load clips early, convert samples into specimens on-board, then score efficiently. I led major mechanical design decisions as team captain, with primary ownership of the intake system.
Engineering Portfolio
Problem
Into the Deep rewards fast, repeatable cycles, but samples are tightly packed and easy to disturb when the intake requires perfect alignment. A slow or finicky pickup cascades into missed clips, jams, and lost scoring time.
Solution
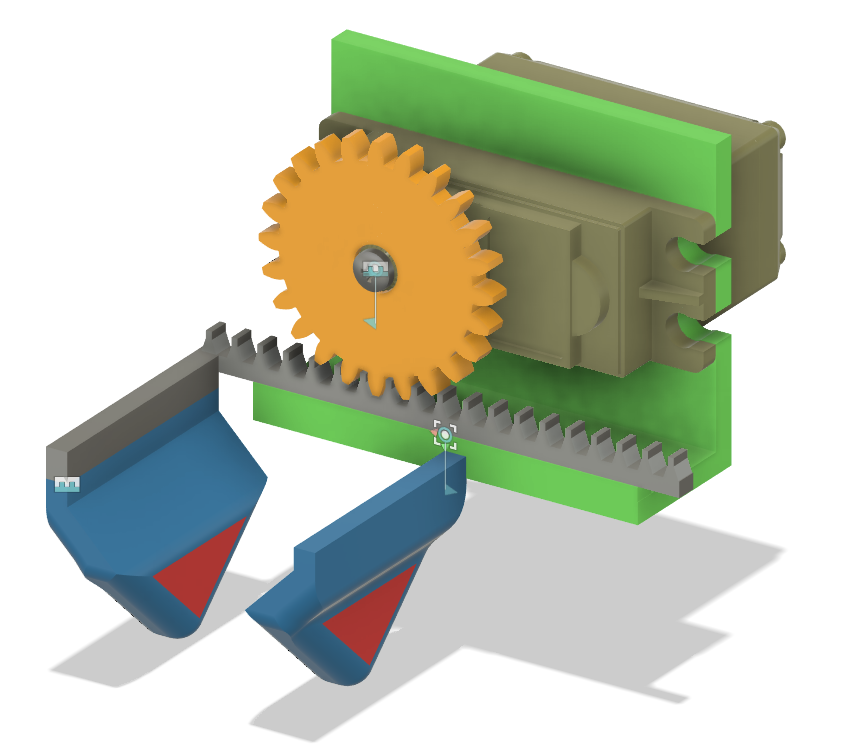
A clip-bot architecture: clips are stored on the robot, then applied during the cycle so the robot can produce specimens without constant human-player intervention. The intake was designed to grab specimens from the inside or any side to stay tolerant to misalignment and adjacent samples, which decreases travel time significantly.
Mechanical Highlights
- Clip-first match flow: Clips are loaded at the start and managed on-board, enabling repeated specimen conversion during TeleOp with fewer resets.
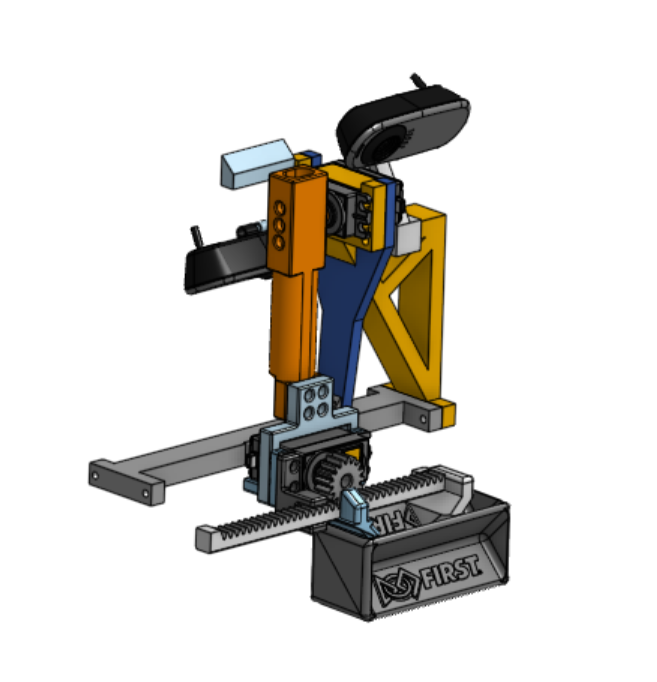
- Auto-aligning intake geometry: Triangle claw can capture specimens from the interior or edges, reducing dependency on approach angle and minimizing adjacent interference.
- Intake-focused design ownership: Intake geometry and mechanics were iterated specifically to remove alignment burden from the driver and increase cycle consistency.
- Integrated handling pipeline: Intake → clip attachment → scoring treated as one system so handoffs are repeatable rather than “driver finesse.”
- Mechanism iteration under constraint: Subsystem designs balanced reach, stability, and packaging within the FTC size/weight envelope.
- Prototype-driven refinement: Early mechanisms were tested and revised based on real interaction with packed samples and field constraints.
Software Highlights
- Match flow control: Clip storage and specimen conversion were treated as a deterministic, repeatable driver workflow.
- Subsystem coordination: Intake, clip application, and scoring timing were tuned as one pipeline rather than isolated steps.
- Vision alignment: Cameras were used to auto-align to samples and reduce approach time.
Image gallery